6.3.1 Walking Legs1. Draw a thigh-bone profile using a B-spline curve. 2. Select the function Animate/Create/Sweep and define the center point for rotation. Because your thigh-bone usually rotates about hip-bone, click <LMB> over the upper end of the bone. 3. Draw a closed path for the knee (lower end of the thigh-bone); use <BACKSPACE> and <RMB> to close and end the path definition. 4. Make the new level created by the Sweep function the current level and create the shin-bone at the same hierarchy level with the thigh-bone. 5. Apply the function Animate/Create/Sweep to the shin-bone so the shin- bone will be rotated about the knee-cap. |
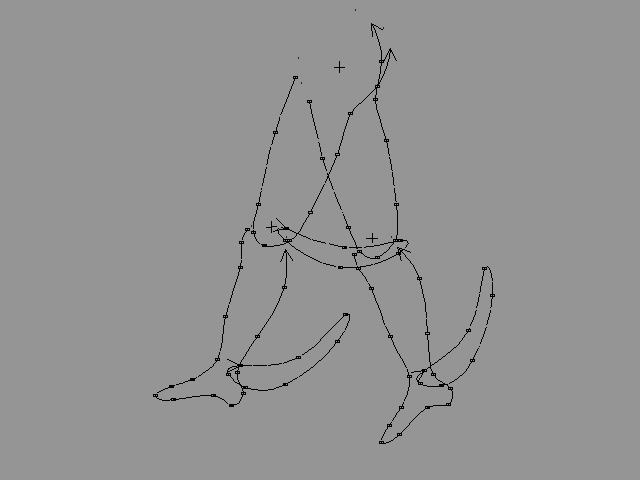 YouTube Figure T6-12: Structure of a Leg. |
|
The upper end of the thigh-bone is fixed to the hip while the knee follows a B-Spline curve. The upper end of the shin-bone is fixed to the knee while a route for the ankle is defined by a B-Spline. Because of hierarchical construction, the parameters used for rotating shin-bone are rotated with the thigh-bone. Play the animation and your leg should behave a bit like a real leg. However, in order to make it work perfectly, we have to analyze how a real leg works. The first observation is that the shin-bone and the thigh-bone comprise a straight line until the leg starts to return back from its back position. In other words, our shin-bone should not be rotated until the time reaches the value 0.5. So, define the Start time value of the hip-bone sweep method to that value, set the End time value to 1.0 and play the animation. Now the shin-bone should not be rotated until the leg starts to rotate back to its starting position. How to create another leg? 1. Duplicate the leg. Now you have two equally functioning legs. 2. Select the method rotating the thigh-bone of the duplicated leg and define the Phase = 0.5 using the function Modify/Properties/Animation. Play the animation and ... you have walking legs. |
| ghh don'tpanic |